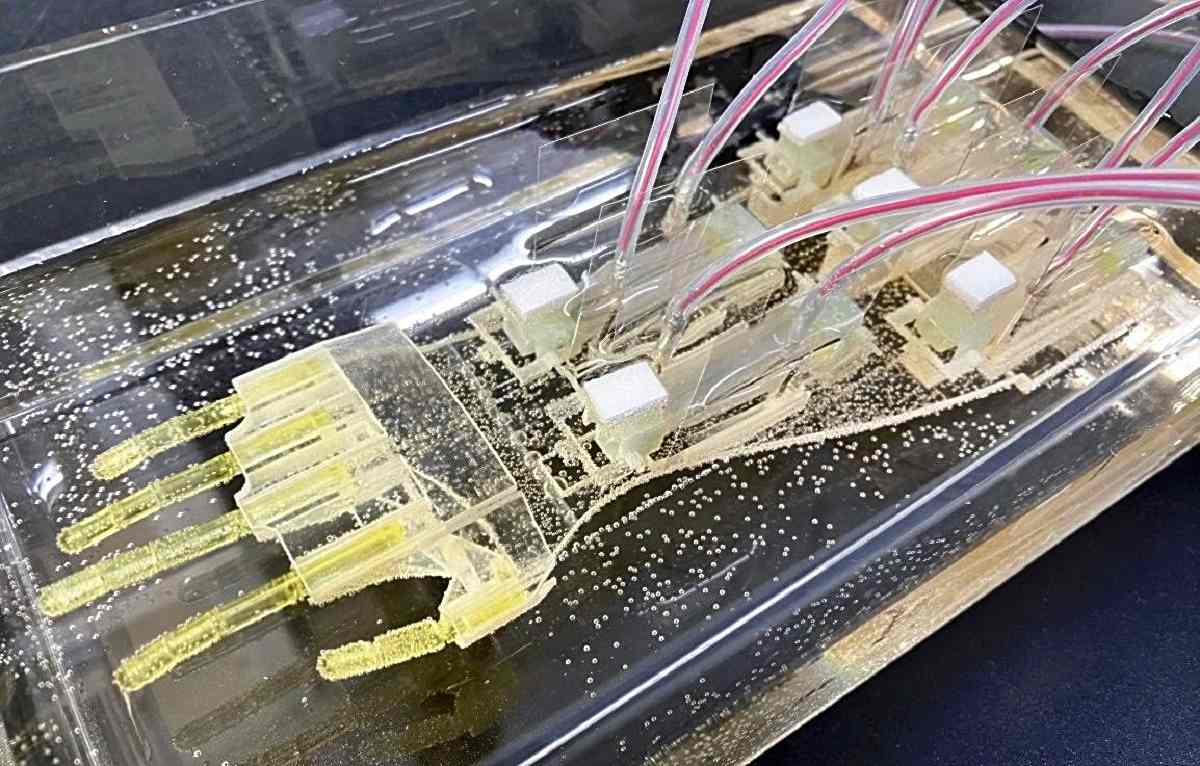
A biohybrid hand that can move by muscles cultured from human-derived tissues is seen. The fingers can bend with electrical stimulation.
7:00 JST, February 23, 2025
A team of researchers from the University of Tokyo and Waseda University has succeeded in creating a biohybrid hand that operates with muscles cultured from human-derived cells.
The research was disclosed in the scientific journal Science Robotics.
With an overall length of 18 centimeters, it is the world’s largest “robot hand” of its kind, the team said. The hand is expected to be applied to artificial arms that move by muscle contractions and robots that move smoothly like humans.
The team cultured human skeletal muscle cells to create a 3-centimeter-long elongated muscle. It then developed a device that allows the muscle to contract and bend the joints of the fingers when the cultured muscle is connected with the biohybrid hand soaked in a culture solution and stimulated with electricity. Five fingers can also move independently.
Thick muscles are needed to move large robots, but cells in thick muscles tend to die because nutrition does not reach their center. The team managed to solve the problem by bundling together multiple elongated cultured muscles and creating a gap where nutrients could be distributed, succeeding in enlarging the biohybrid hand. Previously, a robotic hand’s size was limited to being within a few centimeters long.
Although the hand does not yet have the strength to move objects, “We would like to improve it until it becomes able to lift an apple,” said Shoji Takeuchi, a professor at the University of Tokyo.
“This is an important achievement because if it also becomes possible to combine nerve cells that transmit commands from the brain, we can expect to produce an artificial arm that moves smoothly with a small amount of energy,” said Prof. Toshinori Fujie of the Institute of Science Tokyo.

Most Read
Popular articles in the past 24 hours
-

3,000 Accounts Posting, Spreading Content Critical of Japan on X;...
-

Milano Cortina 2026: Sakamoto Serves as Flag Bearer; Japan Earns ...
-

My Spendthrift Mother Constantly Asks Me for Money
-

A Packed Bus Plunges off a Nepal Highway, Killing 19 and Injuring...
-

Emperor Receives Well-Wishes from Public on His 66th Birthday
-

Dozens of Jewelry, Other Items Stolen After Glass Door, Showcases...
-

1.2 Mil. Rapeseed Flowers Attract Cute Birds, People in Aichi Pre...
-

Mexican Army Kills Leader of Powerful Jalisco New Generation Cart...
Popular articles in the past week
-

Japan PM Takaichi’s Cabinet Resigns en Masse
-

Man Infected with Measles Reportedly Dined at Restaurant in Tokyo...
-

Sanae Takaichi Elected Prime Minister of Japan; Keeps All Cabinet...
-

Japan's Govt to Submit Road Map for Growth Strategy in March, PM ...
-

Bus Carrying 40 Passengers Catches Fire on Chuo Expressway; All E...
-

U.S. Firm to Build Training Hub in Fukushima N-plant for Debris R...
-

Japan, U.S. Name 3 Inaugural Investment Projects; Reached Agreeme...
-

Riku-Ryu Pair Wins Gold Medal: Their Strong Bond Leads to Major C...
Popular articles in the past month
-
Japan PM Takaichi’s Cabinet Resigns en Masse
-

Japan Institute to Use Domestic Commercial Optical Lattice Clock ...
-

Israeli Ambassador to Japan Speaks about Japan’s Role in the Reco...
-
Man Infected with Measles Reportedly Dined at Restaurant in Tokyo...
-

Videos Plagiarized, Reposted with False Subtitles Claiming ‘Ryuky...
-

Man Infected with Measles May Have Come in Contact with Many Peop...
-

Prudential Life Insurance Plans to Fully Compensate for Damages C...
-

Woman with Measles Visited Hospital in Tokyo Multiple Times Befor...
Top Articles in Society
-

Producer Behind Pop Group XG Arrested for Cocaine Possession
-
Man Infected with Measles Reportedly Dined at Restaurant in Tokyo Station
-
Man Infected with Measles May Have Come in Contact with Many People in Tokyo, Went to Store, Restaurant Around When Symptoms Emerged
-
Woman with Measles Visited Hospital in Tokyo Multiple Times Before Being Diagnosed with Disease
-

Australian Woman Dies After Mishap on Ski Lift in Nagano Prefecture
JN ACCESS RANKING
-
Japan PM Takaichi’s Cabinet Resigns en Masse
-
Japan Institute to Use Domestic Commercial Optical Lattice Clock to Set Japan Standard Time
-
Israeli Ambassador to Japan Speaks about Japan’s Role in the Reconstruction of Gaza
-
Man Infected with Measles Reportedly Dined at Restaurant in Tokyo Station
-
Videos Plagiarized, Reposted with False Subtitles Claiming ‘Ryukyu Belongs to China’; Anti-China False Information Also Posted in Japan