Undersea Drone to Check Aging Breakwaters for Damage; Govt Aims to Establish New Business Model for Inspection Technology
17:51 JST, September 2, 2024
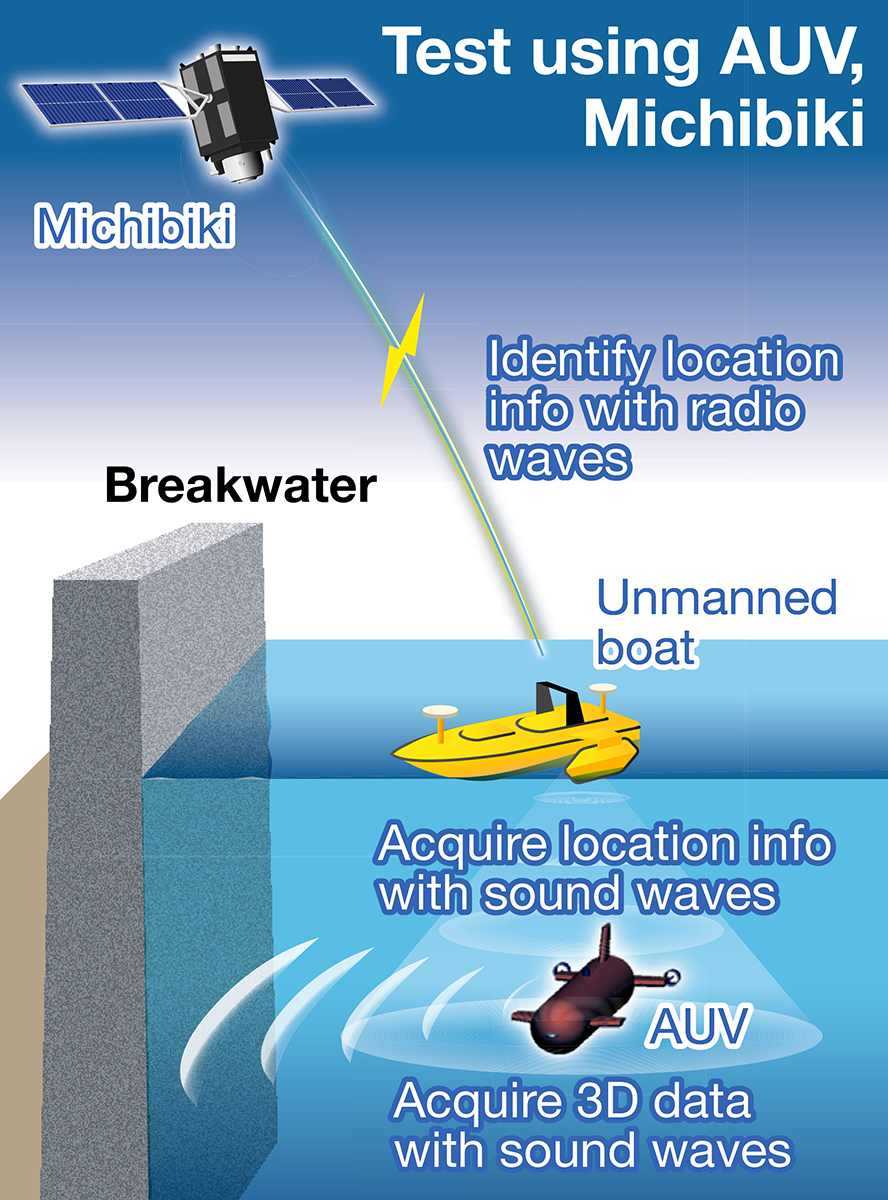
The government has launched a test to inspect aging breakwaters using an autonomous underwater vehicle (AUV) and the quasi-zenith satellite system called Michibiki, which is known as the Japanese GPS.
The aim is to establish inspection technology for underwater infrastructure as a new business model and expand the market for domestically produced AUVs.
AUVs, often called underwater drones, can explore a wide range of waters without being operated by a human. Some models can search down to a depth of 6,000 meters. The production cost per AUV ranges from tens of millions of yen to over ¥1 billion.
The test is being conducted as part of a Cabinet Office project involving Shimane Prefecture and a private-sector company that owns AUVs. In the project, digital data of damage and deterioration of undersea portions of breakwaters at a fishing port in Okinoshima in the prefecture are reproduced as a 3D model. The town was chosen because it is on a remote island, which makes it easy to conduct tests, and there was a need for the inspection of underwater infrastructure.
The central government has a policy to put AUVs into practical use by 2030. Once established, such undersea inspection technology can be utilized for submarine cables and floating offshore wind farms that will be increasingly introduced in the future. The project is therefore expected to spur the entry of new private-sector companies into the business.
In the test, an AUV emits sound waves toward the undersea breakwaters to measure damage and deterioration based on the way the sound waves bounce back, and then it acquires 3D data. In parallel, a camera-equipped underwater robot checks for minor damage.
Many undersea infrastructure inspections require high-precision location information to examine the aging of any damage found. The use of Michibiki, which is capable of high-precision positioning, will improve the accuracy and reliability of the acquired data.
Michibiki emits radio waves and gives an unmanned boat at sea the exact locations of inspection points. The AUV then acquires the location information from the boat via underwater acoustic communications.
Underwater infrastructure are usually inspected by divers, but an expected labor shortage may slow down inspection works. Under such circumstances, the government is eager to reduce the necessary labor by introducing AUVs and other technologies.






Most Read
Popular articles in the past 24 hours
-

Japan Train Company to Increase Fares, Including in Tokyo Metropo...
-

Japan Govt to Tighten Requirements to Receive Permanent Residency...
-

Tail of ANA Plane Struck Runway During Landing in Houston; No Inj...
-

Medical Care at Home and Disasters: Ensure Systems to Provide Con...
-

Samurai Japan Holds First Practice in Miami; Team Will Play again...
-

Iran Targets Busiest International Airport as Top UN Body Demands...
-

Japan to Face Venezuela in World Baseball Classic Quarterfinals
-
CARTOON OF THE DAY (March 12)
Popular articles in the past week
-

Japan Figure Skating Legend Yuzuru Hanyu Is Proud Disaster Surviv...
-

Nippon Life Insurance's U.S. Arm Sues OpenAI Over Legal Assistanc...
-

Ibaraki Pref.'s 1st Foreign Bus Driver Hired in Tsukuba
-

Govt to Utilize ODA for Ensuring Economic Security; Securing Ener...
-

Massive Sewer Pipe Found Jutting Out of Highway in Osaka
-

Beckoning Cats Get Makeover to Fit Modern Lifestyles with Sleek D...
-

Japan Govt Survey Finds Just 10% of Workers Want Working Hours to...
-

Japan's 2nd Round of U.S. Investments May Be Worth Over $100 Bill...
Popular articles in the past month
-

Producer Behind Pop Group XG Arrested for Cocaine Possession
-

Japan PM Takaichi’s Cabinet Resigns en Masse
-

Man Infected with Measles Reportedly Dined at Restaurant in Tokyo...
-

Videos Plagiarized, Reposted with False Subtitles Claiming ‘Ryuky...
-
Japan Figure Skating Legend Yuzuru Hanyu Is Proud Disaster Surviv...
-

iPS Treatments Pass Key Milestone, but Broader Applications Far f...
-

Sanae Takaichi Elected Prime Minister of Japan; Keeps All Cabinet...
-

Nepal Bus Crash Kills 19 People, Injures 25 Including One Japanes...
Top Articles in Science & Nature
-
iPS Treatments Pass Key Milestone, but Broader Applications Far from Guaranteed
-

Record 700 Startups to Gather at SusHi Tech Tokyo in April; Event Will Center on Themes Like Artificial Intelligence and Robotics
-
iPS Cell Products for Parkinson’s, Heart Disease OK’d for Commercialization by Japan Health Ministry Panel
-

Japan to Ban Use of Power Banks on Airplanes
-

Japan Govt Aims for 10-Fold Increase in Computing Power of Supercomputers for AI Use at Universities, Research Institutions
JN ACCESS RANKING
-
Producer Behind Pop Group XG Arrested for Cocaine Possession
-
Japan PM Takaichi’s Cabinet Resigns en Masse
-
Man Infected with Measles Reportedly Dined at Restaurant in Tokyo Station
-
Videos Plagiarized, Reposted with False Subtitles Claiming ‘Ryukyu Belongs to China’; Anti-China False Information Also Posted in Japan
-
Japan Figure Skating Legend Yuzuru Hanyu Is Proud Disaster Survivor and Gold Medalist, Vows to Continue Support Efforts